Martin Merck
IT Lunch
February 26
th
2010
Introduction to GPU Computing
IT Lunch
February 26
th
2010
What is GPU computing
2/26/10
Martin Merck
2
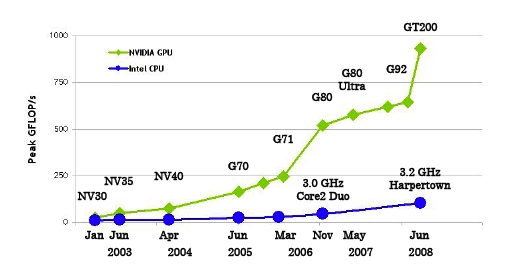
• 3D Graphic cards need to perform lots of
matrix operations to render images
• To achieve the high throughput massively
parallel computing is implemented on
graphic cards
• Basically old vector processing at a much
bigger scale
• CHEAP !!! (Gaming hardware is driving the
development and has a mass market)
IT Lunch
February 26
th
2010
Computing power evalution
2/26/10
Martin Merck
3
IT Lunch
February 26
th
2010
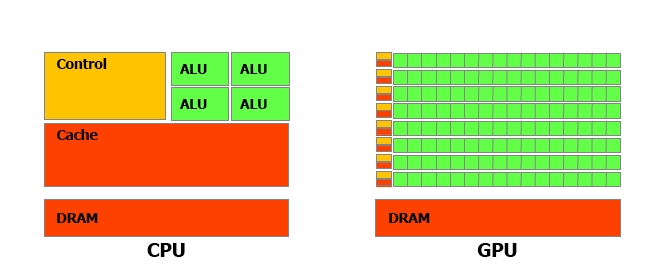
Difference between a classical CPU
and the GPU architecture
2/26/10
Martin Merck
4
• CPU
• Independent cores
• Lots of cache
• Prefetching and branch
prediction
• Heavy weight threading
• GPU
• Single instruction multiple
thread (SIMT)
• Little cache, lots of registers
• Overhead free threading
• No real branching
IT Lunch
February 26
th
2010
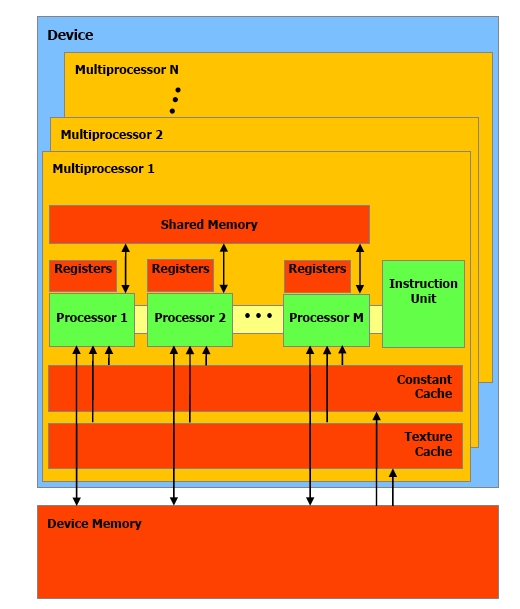
Detailed architecture of the NVidia
Graphics cards
2/26/10
Martin Merck
5
• Basic building block is a
Streaming Multiprocessor
(SM) (30 on GTX 295)
– Executes the same
program on all processors
– Branching handled by
executing all branches
and turning of single
processors
– Each multiprocessor
consists of 8 Scalar
Processor (SP), 2 special
function units and shared
(fast) memory
– Runs 32 threads
concurrently (called warp)
IT Lunch
February 26
th
2010
The CUDA software architecture
2/26/10
Martin Merck
6
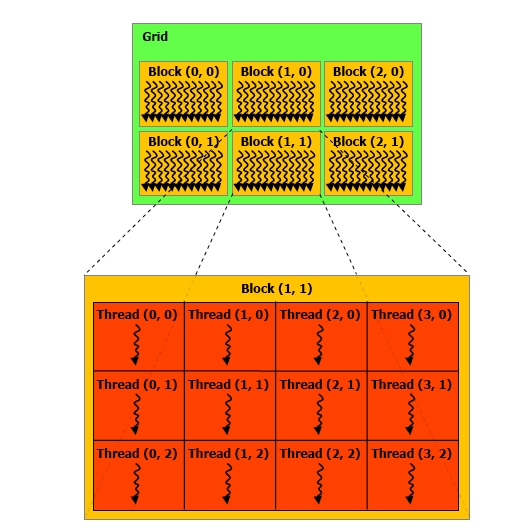
• Basic programming unit is a “Kernel”
• Represents a function which is executed on a
CUDA device un a huge number of parallel
threads. (~1000 - 10000)
• Individual threads are combined into “blocks”. A
block can have up to 3 dimensions to map easily
to vectors, matrices and fields
• Each block is executed on one multiprocessor
• Blocks are group at a higher level into one or two
dimensional “Grids”. This allows to execute the
same kernel on several of the multiprocessors
IT Lunch
February 26
th
2010
Software
2/26/10
Martin Merck
7
• Each thread is the
same code.�
To select different
data to process they
use global variables
for the blockIdx/
gridDim and
threadIdx/
blockDim. These
are 3 dimensional
indices.
IT Lunch
February 26
th
2010
The CUDA software architecture
2/26/10
Martin Merck
8
• Basic programming unit is a “Kernel”
• Represents a function which is executed on a
CUDA device un a huge number of parallel
threads. (~1000 - 10000)
• Individual threads are combined into “blocks”. A
block can have up to 3 dimensions to map easily
to vectors, matrices and fields
• Each block is executed on one multiprocessor
• Blocks are group at a higher level into one or two
dimensional “Grids”. This allows to execute the
same kernel on several of the multiprocessors
IT Lunch
February 26
th
2010
A simple code example
Matrix Multiplication 1
2/26/10
Martin Merck
9
#include <stdio.h>
#include <cuda.h>
// Matrix multiplication kernel – per thread code
__global__ void MatrixMulKernel(float* A, float* B, float* C, int Width)
{
float Celement= 0;
for (int k = 0; k < Width; ++k) {
float Aelement = A[ threadIdx.y * Width + k ];
float Belement = B[ k * Width + threadIdx.x ];
Celement += Aelement * Belement;
}
B[ threadIdx.y * Width+threadIdx.x ] = Celement;
}
IT Lunch
February 26
th
2010
A simple code example
Matrix Multiplication 1
2/26/10
Martin Merck
10
int main(void)
{
float *a_h, *b_h;
// pointers to host memory
float *a_d, *b_d, *c_d;
// pointer to device memory
int N = 10*10;
size_t size = N*sizeof(float);
// allocate arrays on host
a_h = (float *) malloc(size);
b_h = (float *) malloc(size);
// Initialize arrays
cudaMalloc((void **) &a_d, size); // allocate array on device
cudaMalloc((void **) &b_d, size); // allocate array on device
cudaMalloc((void **) &c_d, size); // allocate array on device
cudaMemcpy(a_d, a_h, sizeof(float)*N, cudaMemcpyHostToDevice); // copy data from h2d
cudaMemcpy(b_d, b_h, sizeof(float)*N, cudaMemcpyHostToDevice)
MatrixMulKernel<<< 1, N*N>>> (a_d, b_d, c_d, 10); // do calculation on device
cudaMemcpy(c_h, a_d, sizeof(float)*N, cudaMemcpyDeviceToHost);
free(a_h); free(b_h);
cudaFree(a_d); cudaFree(b_d); cudaFree(c_d);
}
IT Lunch
February 26
th
2010
nvcc
The CUDA C-Compiler
2/26/10
Martin Merck
11
• Code is C-like
• No C library functions can be used, but cuda
library replicates all math functions and basic
malloc, memcpy etc.
• No recursions
• No variable list parameters
• No static variables
• Just basic operators and flow control
• Compiler separates device and host code and
compiles device code.
• Does all register allocation etc.
IT Lunch
February 26
th
2010
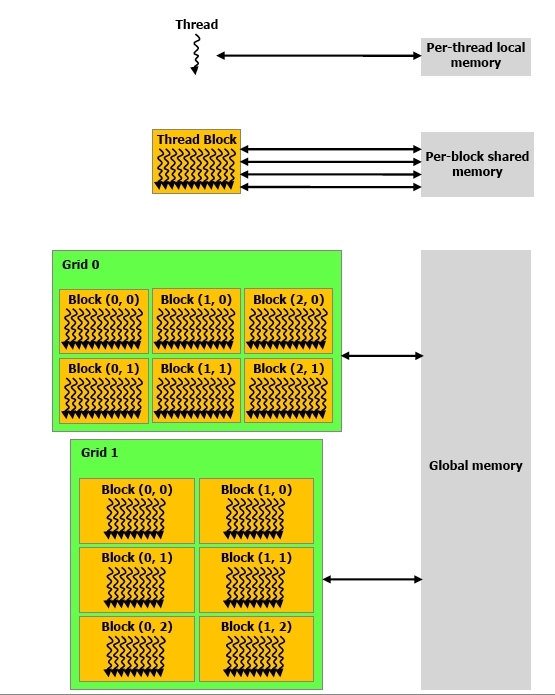
Memory models in CUDA
2/26/10
Martin Merck
12
• Each thread has a set of
registers and local
variables.
• A thread block can share
fast memory between all
threads. Threads in a block
can be synchronized.
• Threads in different blocks
and grids can only share
global device memory.
• The host process can only
access the global memory
area
IT Lunch
February 26
th
2010
Streams
Parallel execution of kernels
2/26/10
Martin Merck
13
• CUDA host functions are all asynchronous.
• Streams can be used to group host/memory
IO and kernel execution into parallel flows.
• Overlaps IO and kernel execution to use
device while other IO is being performed.
IT Lunch
February 26
th
2010
Conclusions
2/26/10
Martin Merck
14
• Easy to learn (basics)
• Cheap to build test/play systems
• Works great for highly parallel compute intensive
applications�
(Image processing, video en-/decoding, neural nets,
SVM)
• Algorithms need lots of optimization to hardware
limitations
• Lots of applications already available or having
optimized plugins�
(Mathematica, MatLab, Adobe Flash, NueralNet tools,
etc.)
IT Lunch
February 26
th
2010
Showcase
2/26/10
Martin Merck
15
IT Lunch
February 26
th
2010
More info
2/26/10
Martin Merck
16
• http://www.nvidia.com/object/
cuda_home_new.html
• http://developer.nvidia.com/object/
gpucomputing.html
• http://www.drdobbs.com/architect/
207200659
• http://courses.ece.illinois.edu/ece498/al/
Syllabus.html